Sketch & Refine
One day as I play game, I thought to myself, "hmm… having a split personality sarcastic personal robot assistant sounds fun." So that is where the sketch comes from and the idea is quite simple to understand, the robot will move around freely when user is at public space or not present. When there is an event coming up, the robot will speak to notify user about it. If the user comes close to the social space, the robot will act as a mouse pointer, so user know where they are pointing at and they can move around freely to select the things they want to view.
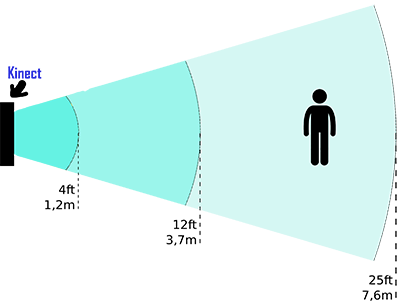
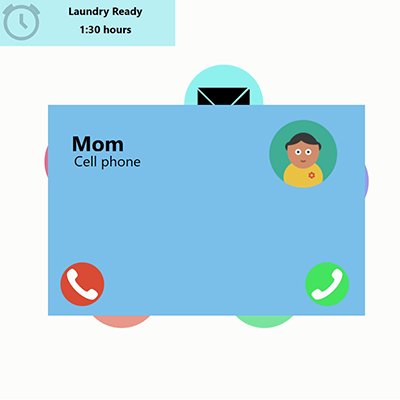
The other sketch that inspired my final prototype's visual aspect is the "caller". Basically this proxemics display is a huge phone for calling others only. When user is at pubic space, they can view their contact list. Then when they are at the social space, the user can select the person they want to call. To call that person, user can simply step into the personal space. Once the call is started, the Kinect will act as a full body camera, so that the user can enjoy video call without the need to hold a phone.
Due to some event happened in real life, I wasn't able to make some satisfy refinement before the initial prototype demo. So I just took the two sketch I mentioned above, fuse them together and I get something I am somewhat happy about. A phone notification notify-er, since my persona Alice don't like the constant sound notification from the phone and she need something to notify her about the event she would otherwise forget. A more visual notification would be what she need.
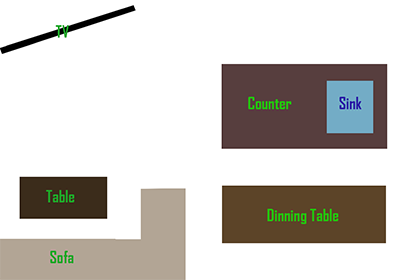
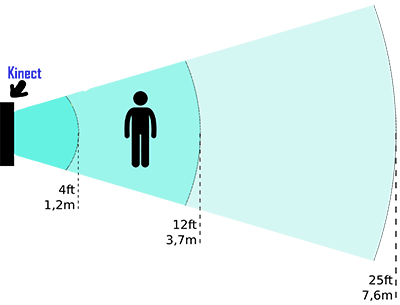
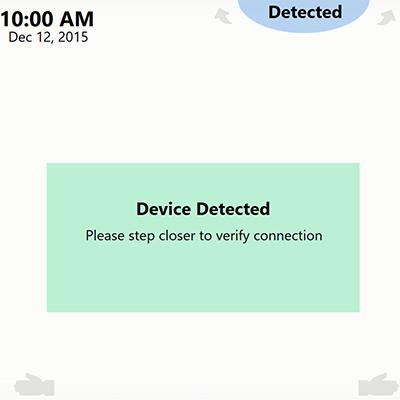
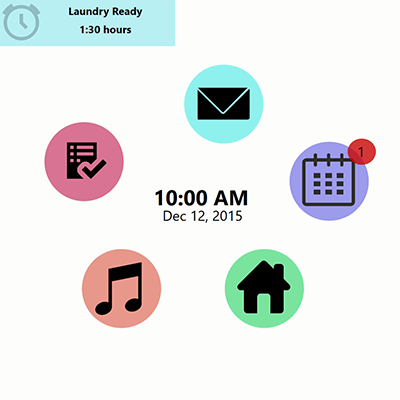
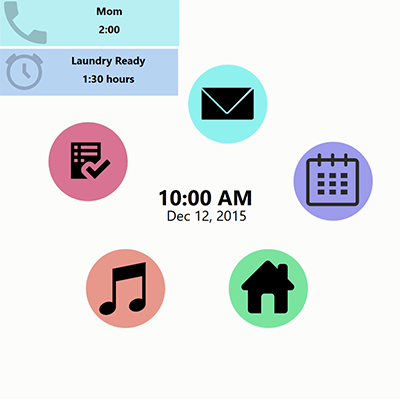
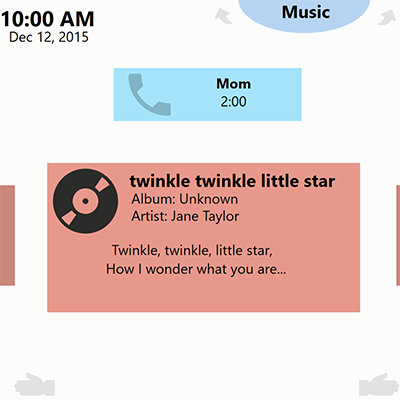
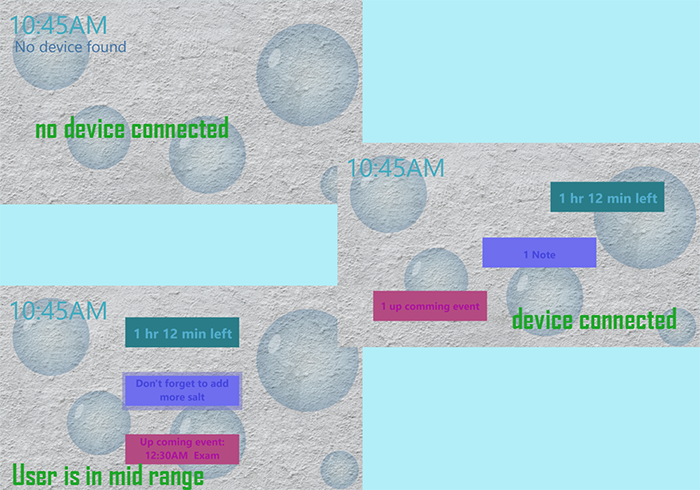
Operating the display is not too hard. At public space, the screen will display all unread notification and ongoing event like a timer. If the user step into social space, more detail will be shown and user can select between item by using simple hand gesture like close hand. Once a notification is selected, user can step into the personal space to see full detail of that notification. If there is no device connect to the display, a no device found message will be present and the display will not respond to proximity input. As you can tell, this prototype is thematically very close to robot assistant idea. Minus the robot of course, since Alice probably will not enjoy a sarcastic robot talking to her all the time.
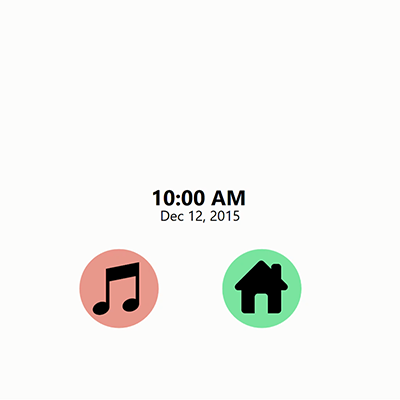
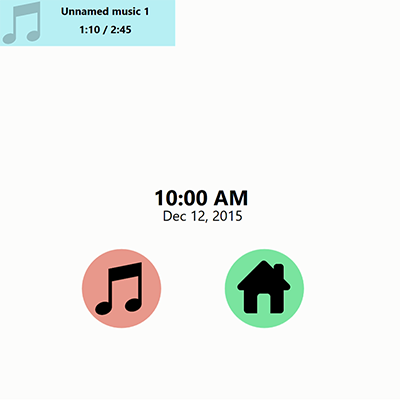
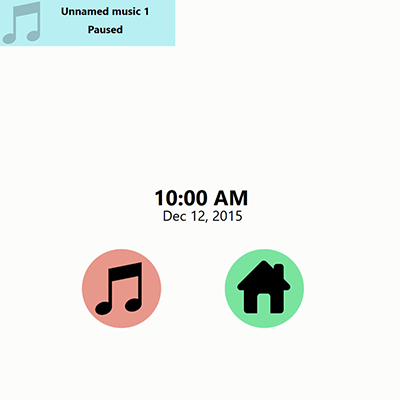
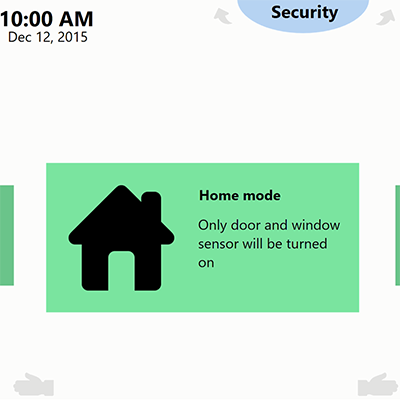
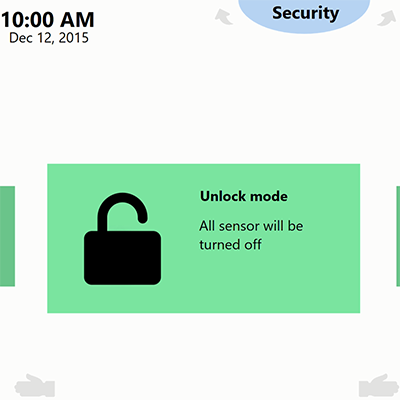
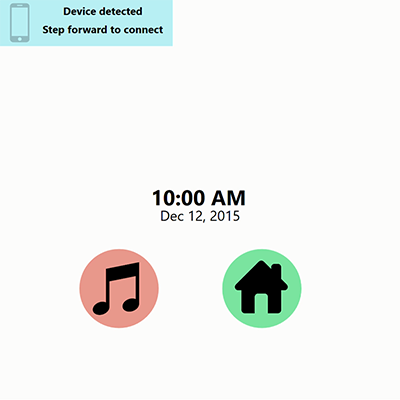
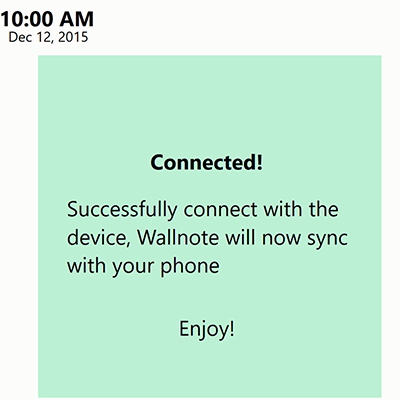
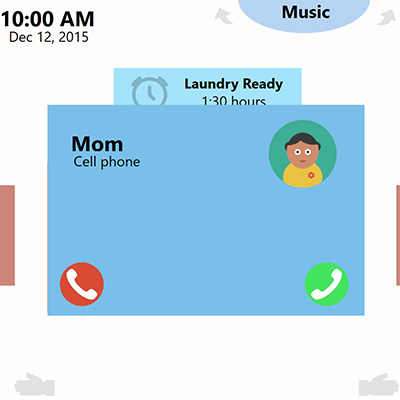
After gathered some feedback from first prototype demo, I come up with this idea of two mode. One mode is no device connected to the display, the device will be more generalized where user will not get any notification from their phone, but they will be able to listen to music, change their home security mode and use the display as a clock, etc (basically a smart home). The proximity input will get processed in this mode, thus eliminate the problem in the first prototype where the display will not be a proxemics display for almost half of the time, since the user probably will not connect their phone to the display 24/7. When the phone is connected to the display, user will be able to receive notification from their phone like the first prototype.
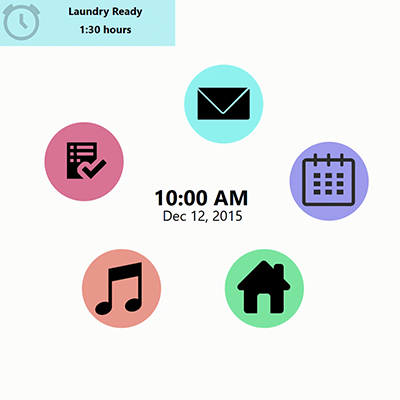
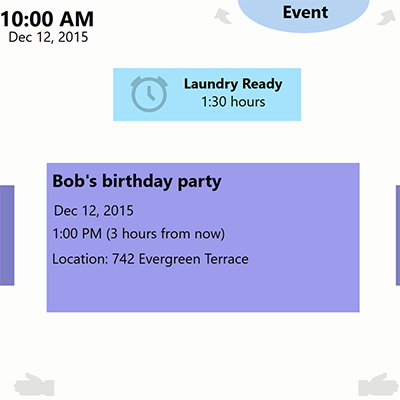
Other than the difference I mentioned above, this refinement works the same way as first prototype. At public space, they will get a more generalized overview of their notifications. When the user step into social space, they will get more detailed information. Each notification is separated into different categories, thus eliminated the need for the user to cycle thought a lot of notification just to get to the one they want to see. User can close their hand to cycle between categories and wave hand to change between notifications in the same categories. When the use find the notification they want to see more detail, they can simply walk into personal space to view it.
Side note: As for the final prototype, the last screen (personal space screen) is been removed. Since the need for it for my design is quite small (it would not be utilized a side for maybe change music volume). The social space screen actually give enough information to the user to let them judge if they want to act to the notification. Thus for the prototype demonstration you will not see any mention of that screen. However if you download and run the prototype yourself, you will find the personal space screen is actually still there, which is because I don't have enough time to remove it from the code. But if I have the time, I will eliminate all trace of that screen from my code.
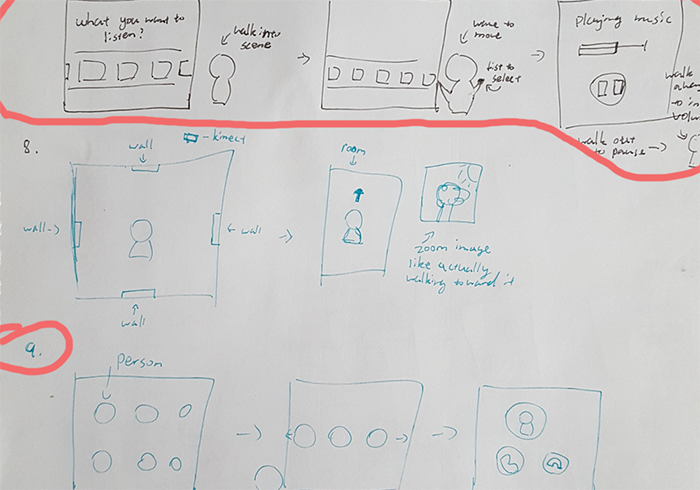 Initial Sketch
Initial Sketch
 First Prototype
First Prototype
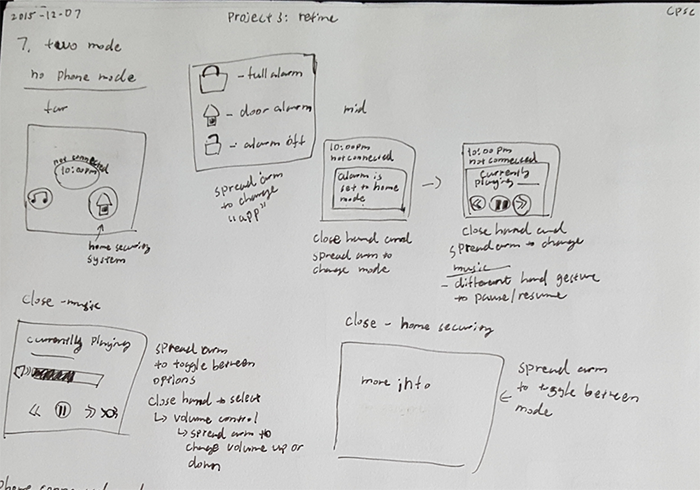 No Connection Mode
No Connection Mode
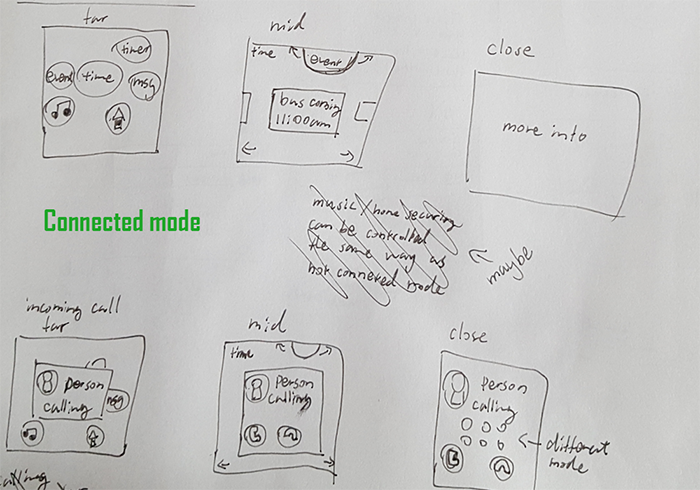 Connected Mode
Connected Mode